
Bild: Beide Prototypen der Ultraschall Windmesser Seite an Seite.
Diese Seite beschreibt meine eigene Entwicklung eines Ultraschall-Windmessers (Ultraschall Anemometer).
Es handelt sich um zwei Prototypen eines Präzisionsmessgeräts, die den
Vergleich mit kommerziellen Geräten nicht zu scheuen brauchen.
Lesen Sie dazu auch mein Fazit am Ende dieser Seite.
Bild: Beide Prototypen der Ultraschall Windmesser Seite an Seite.
Alle Rechte vorbehalten!
Es sind zwei verschiedene Prototypen entstanden. Unter Weiterentwicklung gibt es die Neuerungen bei der zweiten Version zu sehen.
Diese Seite ist keine Nachbauanleitung, sondern eine kurze, im Verlauf von nun fast 10 Jahren entstandene, Beschreibung der Entwicklung. Die mathematischen Methoden können in dieser Kürze nur erwähnt werden und setzen zum Verständnis im Allgemeinen ein einschlägiges Hochschulstudium voraus. Das soll nun aber niemand vom Lesen dieses kleinen Artikels abhalten. Nur ich kann die mathematischen Grundlagen nicht weiter vertiefen. Dabei habe ich aber versucht mit Verweisen (oft Wikipedia) für Erklärung zu sorgen.
Es handelt sich hier um einen sich weiterentwickelnder Entwurf. Ich freue mich über Korrekturen oder Anregungen. Vielleicht hat auch jemand mit Lust meine Übersetzung ins Englische zu verbessern.
Von 2010 bis Ende 2012 arbeitete ich an der Weiterentwicklung.
Diese Seite wird immer wieder an den unterschiedlichsten Stellen erweitert.
Bei Interesse ist also ein Blick über die ganze Seite von Zeit zu Zeit empfehlenswert.
Letzte Ergänzung der Webseite: 31. August 2022
Translation into English language.
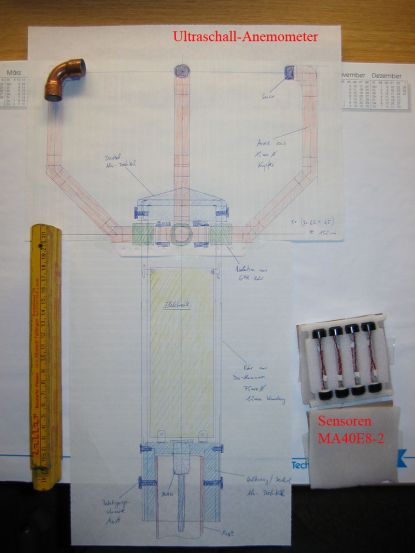 Bild: Skizze des geplanten Aufbaus (Ende 2004). |
 Bild: Ergebnis (Mitte 2008). |
| Windgeschwindigkeit | Messbereich | 0...45 m/s | OK |
| Genauigkeit |
±0,3 m/s rms bzw. ±2 % rms Der jeweils grössere Wert zählt | OK* ** | |
| Auflösung | 0,05 m/s | OK | |
| Windrichtung | Messbereich | 0...359° | OK |
| Genauigkeit | ± 2.0° rms (>5m/s) | OK* | |
| Auflösung | 1° | OK | |
| Virtuelle Temperatur | Messbereich | -30 ... +60 °C | OK*** |
| Genauigkeit | ± 1 K (Wind < 10 m/s) | OK* | |
| Auflösung | 0,1 K | OK | |
| Datenausgabe | Schnittstelle | RS485 (RS232) | |
| Baudrate | 19200 Baud / 115200 Baud (debug) | ||
| Ausgabe | Windgeschwindigkeit, Windrichtung, (Virtuelle Temperatur,) Status | ||
| Ausgaberate | 4 pro Sekunde (WMO-Vorgabe) / 1 pro Sekunde (Prototyp II) | ||
| Allgemein | Interne Messrate | 400 Messungen pro Sekunde / 80 Mesungen pro Sekunde | |
| Betriebsspannung | Elektronik 13..18 V DC, Heizung 13..18 V DC, Max. 7A | ||
| Schutzart | IP 54 | ||
| Vereisung | Durch Heizung weitgehend verhindert | ||
| Montage | auf Mastrohr 50mm | ||
*) keine Kalibrierung nach DKD.
**) bei vollständiger Kalibrierung (nur Prototyp II).
***) Wert wird beim Prototyp II bisher nicht explizit ausgegeben.
Dieses Ultraschall Anemometer dient zur zweidimensionalen Erfassung der horizontalen Komponenten der Windgeschwindigkeit und der Windrichtung sowie der Virtuellen Temperatur. Aufgrund der hohen Messrate eignet sich dieses Messverfahren zur trägheitslosen Böen- und Spitzenwertmessung. Die erreichbare Genauigkeit bei der Messung der Lufttemperatur (Virtuelle Temperatur) übertrifft teilweise die der klassischen Verfahren, bei denen Temperaturmessfühler in einem Wetter- und Strahlungsschutz verwendet werden. Die Messwerte werden als Datentelegramm über eine serielle Schnittstelle bereitgestellt. Die Sensoren und der Gerätekörper werden bei Frost geregelt beheizt. Somit ist die Funktion auch bei Schneefall und Eisregen sichergestellt, sowie die Möglichkeit einer Vereisung weitgehend verhindert.
Dieses Ultraschall Anemometer besteht aus 4 Ultraschall-Wandlern, von denen sich jeweils 2 Wandler im Abstand von ca. 21 cm gegenüberstehen. Die dadurch gebildeten zwei Messstrecken stehen senkrecht zueinander. Die Wandler fungieren sowohl als Schallsender als auch als Schallempfänger. Mit dem Start einer Messung läuft eine Sequenz von 4 Einzelmessungen in alle 4 Richtungen der Messstrecken ab. Die Messrichtungen (Schallausbreitungsrichtungen) verlaufen rotierend. Aus den 4 Einzelmessungen der Streckenrichtungen wird ein vektorieller Wert gebildet und zur weiteren Berechnung verwendet. Die benötigte Zeit für eine Messsequenz liegt bei 10 Millisekunden.
Auch wenn auf dieser Seite die Laufzeitmessung eines kurzen Schallimpulses immer wieder auftaucht, handelt es sich hierbei eigentlich um eine Phasenmessung mit nachgeordneter Zuordnung der Absolutphase durch Laufzeitmessung. Gewonnen wird die Phase durch eine Messung mehrerer Nulldurchgänge des Empfangssignals im Bereich einer ausreichend großen Amplitude nach Ankunft des Signals. Rauschen und ein möglicher Offset des Komparators werden durch die Mittelung von positiven und negativen Nulldurchgängen aufgehoben.
Durch einen adaptiven digitalen Filter, der das Empfangssignal mit einem Referenzsignal vergleicht, wird der "richtige" Nulldurchgang der Phasenmessung zugeordnet. Es wird somit indirekt ein Teil der Hüllkurve des Signals bewertet.
Bei der Laufzeitmessung besteht das wesentliche Problem der Erkennung des Anstieges der Amplitude des Signals. Der Anstieg der Amplitude ist aber bedingt durch Turbulenzen in der Luft, welche dem Signal Energie entziehen, nicht konstant. Diese Turbulenzen werden u.a. durch die Schallwandler selbst hervorgerufen und sind bei höherer Windgeschwindigkeit ausgeprägter.
Wenn ein Amplitudenanstieg unerwartet ausfällt, besteht die Gefahr einen Sprung in den Messungen zu erfahren, indem der Schwellwert der Amplitudendetektion eine Schwingung früher oder später das Signal detektiert. Das führt zu falschen Windgeschwindigkeiten und Temperaturmessungen.
Lösung für dieses Problem ist ein Kalman-Filter. Bei der digitalen Nachbearbeitung wir die Sicherheit bei der Detektion mit einbezogen. Es werden mehrere Messungen für eine vektorielle Erfassung benötigt. Dabei darf z.B. die gemessene Temperatur zwischen den beiden linear unabhängigen Richtungen nicht unterschiedlich sein. Es wird ja der gleiche Luftraum vermessen. Die Geschwindigkeiten in Hin- und Rückwärtsrichtung müssen korrespondieren. Ebenso kann sich die Windgeschwindigkeit und Temperatur bei einer hohen Messfrequenz nur begrenzt schnell ändern. Mit allen diesen Überprüfungen kann eine ausreichend sichere Detektion sichergestellt werden.
Beim Kalman-Filter besteht das Problem beim Start oder nach Unterbrechung der Messung die Abschätzung mit den richtigen Startwerten zu beginnen.
Und genau hier liegen auch die Grenzen. Eine Lösung gibt es erst durch die erweiterten Möglichkeiten mit einer größeren Bandbreite. Lesen Sie dazu bei der Weiterentwicklung.
Die Ausbreitungsgeschwindigkeit des Schalls in ruhender Luft überlagert sich die Geschwindigkeitskomponente einer Luftbewegung in Windrichtung. Eine Windgeschwindigkeitskomponente in Ausbreitungsrichtung des Schalls unterstützt dessen Ausbreitungsgeschwindigkeit, führt also zu einer Erhöhung derselben, eine Windgeschwindigkeitskomponente entgegen der Ausbreitungsrichtung führt dagegen zu einer Verringerung der Ausbreitungsgeschwindigkeit.
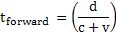

mit Abstand d zwischen den Wandlern, Schallgeschwindigkeit c, Windgeschwindigkeit v,
Laufzeit des Schalls vorwärts tforward und Laufzeit des Schalls zurück tback.
Die aus der Überlagerung resultierende Ausbreitungsgeschwindigkeit führt
zu unterschiedlichen Laufzeiten des Schalls bei unterschiedlichen Windgeschwindigkeiten
und Richtungen über eine feststehende Messstrecke.
Da die Schallgeschwindigkeit stark von der Temperatur der Luft abhängig
ist, wird die Laufzeit des Schalls auf jeder der beiden Messstrecken in beide
Richtungen gemessen. Dadurch kann der Einfluss, den die Temperatur auf das
Messergebnis hat, durch Subtraktion der reziproken Laufzeit ausgeschaltet werden.
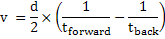
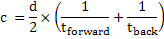
mit Abstand d zwischen den Wandlern, Schallgeschwindigkeit c, Windgeschwindigkeit v,
Laufzeit des Schalls vorwärts tforward und Laufzeit des Schalls zurück tback
Diese Darstellung gilt bei der Schallgeschwindigkeit (=Temperatur) aber nur bei Windstille!
(siehe weiter unten)
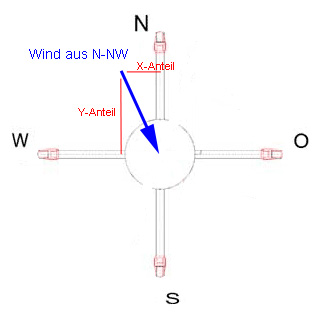
Bild: Anordnung der Schallwandler und Himmelsrichtungen
Nach Messung der Geschwindigkeitskomponenten entlang der Messstrecken werden diese anschließend durch den Mikroprozessor des Anemometers in Polarkoordinaten transformiert und als Betrag und Winkel der Windgeschwindigkeit ausgegeben.
mit dem Betrag der Windgeschwindigkeit |v| und zwei Teilwindgeschwindigkeiten vx
und vy in Nord-Süd bzw. West-Ost -Richtungen.
Die Richtung des Windes wird durch Anwendung der Winkelfunktion Arcustangens gewonnen. Dabei ist bei der Berechnung der richtige Quadrant extra zu berücksichtigen.
Die Ausbreitungsgeschwindigkeit des Schalls ist über eine Wurzelfunktion von der absoluten Temperatur der Luft abhängig, jedoch annähernd unabhängig vom Luftdruck und nur gering abhängig von der Luftfeuchte. Daher kann dieser physikalische Zusammenhang für eine Temperaturmessung der Luft bei bekannter und konstanter chemischer Zusammensetzung genutzt werden. Es handelt sich hierbei um eine Messung der Gastemperatur ohne den Umweg der thermischen Kopplung dieses Gases zu einem Messfühler.
c = 331,5 m/s * √(1 + T/273,15) mit Schallgeschwindigkeit c [m/s] und Temperatur T [°C]
Wegen der schwachen Abhängigkeit der Ausbreitungsgeschwindigkeit des Schalls von der Luftfeuchte bezieht sich die "Akustische Virtuelle Temperatur" auf trockene Luft (0% Feuchte) unter gleichen Druckbedingungen wie die aktuell gemessene.
Tv = c2 / 402,31466 - 273,15 mit Schallgeschwindigkeit c [m/s] und Akustischer Virtuelle Temperatur Tv [°C]
Die Abweichung der gemessenen "akustischen Virtuellen Temperatur" zur realen Lufttemperatur ist linear vom absoluten Feuchtegehalt der Luft abhängig. Der Anteil des Wasserdampfes in der Luft führt anteilsmäßig zu einer Erhöhung der Schallgeschwindigkeit, da H2O Moleküle etwa nur die Hälfte der Masse der restlichen Luftmoleküle (O2 und N2) besitzen. Die Erhöhung der Schallgeschwindigkeit führt zu einer scheinbaren (virtuellen) Erhöhung der gemessenen Temperatur feuchter Luft im Vergleich zu trockener Luft gleicher Temperatur.
Die Abweichung der gemessenen Virtuellen Temperatur von feuchter Luft zur realen Lufttemperatur kann bei Kenntnis der absoluten Feuchte etwa nach folgendem Zusammenhang korrigiert werden:
Tr = Tv - 0,135 K * m3 / g * a
Wobei Tr die reale Lufttemperatur darstellt, Tv die gemessene akustische Virtuellen Temperatur
und a die absolute Feuchte in Gramm H2O pro m3 Luft.
Bei einer Lufttemperatur von 20 °C liegt die Akustische Virtuellen Temperatur bei 100% rel. Feuchte um etwa 2 K zu hoch.
Um nun alle Möglichkeiten ausschöpfen zu können, wurde eine leistungsfähige Schaltung gewählt, die sowohl Amplituden als auch Nulldurchgänge sehr genau erfassen kann und genügend Rechnerleistung für eine aufwendige Nachbehandlung bereitstellt.
Als Mikroprozessor ist ein Microchip dsPIC 30F4012 eingesetzt. Mit 30 MAC/MIPS Rechnerleistung, einem 10-Bit-A/D-Wandler mit bis zu einer Million Abtastungen pro Sekunde und zusätzlich einer analogen Nulldurchgangserkennung ist eine Messung und Anwendung der hybriden Methode durchführbar. Die Zeiten der Nulldurchgänge werden mit einem "Capture"- Eingang erfasst. Der "Capture"-Eingang und der A/D-Wandler haben eingebaute FIFO-Speicher, so dass nicht jeder erfasste Wert ein Interrupt auslösen muss. Die Leistungsfähigkeit ist so hoch, dass selbst mehr als 200.000 Interrupts pro Sekunde kein Problem darstellen. Es ist mit diesem Prozessor möglich sowohl die Amplitudenwerte 500.000-mal pro Sekunde zu speichern, als auch die Zeiten aller Nulldurchgänge mit einer Auslösung von 34 Nanosekunden zu erfassen und zu speichern. Bei jeder einzelnen Laufzeitmessung werden alle Amplitudenwerte des Schallempfängers und alle Zeiten der Nulldurchgänge des Signals gespeichert und erst danach verarbeitet. Der digitale Signalprozessor ist für die Berechnung der Korrelation bestens geeignet.
Im Jahr 2004 war dieser DSP-Mikroprozessor eine echte Innovation. Nur die Speichergröße ist mit 2 KB bei diesem Prozessor (im DIP-Gehäuse) sehr beschränkt. Die Speichergröße war und ist leider häufig an die Gehäuseform gebunden.
Beim Aufbau der Mechanik und Auslegung der Elektronik sind u.a. einige wichtige Punkte zu beachten.
Der Aufbau der Analogschaltung erfordert große Sorgfalt, um das Rauschen gering zu halten. Es kommen sehr rauscharme Operationsverstärker von Linear Technology zum Einsatz. Ebenfalls wird ein sehr schneller und präziser Komparator von Linear Technology eingesetzt. Ein DC/DC-Wandler erzeugt die negative Spannung und mehrere Festspannungsregler erzeugen die verschiedenen Versorungsspannungen.
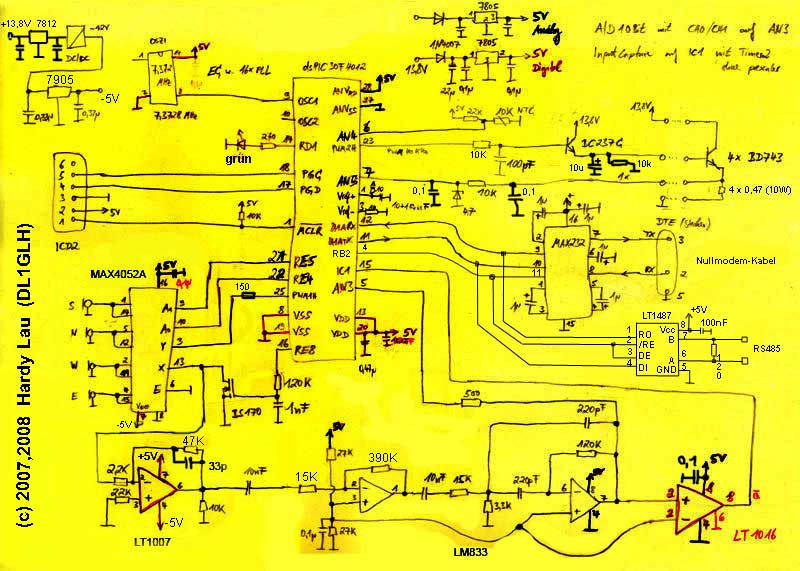
Bild: Vollständiger Schaltplan des ersten Gerätes.
Bild: Bildschirmschnappschuss des Entwicklungssystems
Inzwischen wird Microchip MPLAB 8.92 und der MPLAB C Compiler für PIC24 MCUs und dsPIC v3.31 eingesetzt.
In diesem Programm (2500 Zeilen C-Code) steckt sehr viel Arbeit. Im jetzigen Zustand lässt es sich leider nicht direkt
mit einer anderen Mechanik nutzen.
Es sind die Parameter und vor allem der Mismatched-Filter im Quelltext anzupassen.
Also ist das Binärprogramm für Nachbauten nutzlos und den Quelltext des Programms werde ich nicht veröffentlichen.
Um den maximalen Schallpegel zu erhalten und die Klingelzeit zu minimieren muss eine Anpassung der Sender an die Schallwandler erfolgen. Dazu wurde ein MA40E8-2 mit einem Netzwerkanalysator vermessen.

Bild: Rohde & Schwarz Netzwerkanalysator ZVRE bei der Messung des Schallwandlers (Murata MA40E8-2)
 |
 |
 |
| Bild: S11 Komplex | Bild: S11 Real | Bild: S11 Phase |
Wie man leicht sehen kann, ist die Frequenz bester Anpassung 40,3 KHz bei Raumtemperatur. Dabei beträgt der Widerstand ca. 500 Ohm. Die Resonanzfrequenz ändert sich aber umgekehrt proportional zu Temperatur. In der ersten Version wird der Schallwandler direkt mit 5 Vpp mit einer Impedanz von ca. 220 Ohm angesteuert. Das ist noch nicht optimal und hat im Rückblick sehr viel Probleme verursacht und Zeit bei der Entwicklung vergeudet. Siehe "Weiterentwicklung" am Ende dieser Seite.
 Bild: Gehäuse fertig ohne Arme. |
 Bild: Der Deckel und die Bohrungen für die vier Arme. |
 Bild: Die Masthalterung zum Aufsetzen auf einen 50mm Mast. |
 Bild: Detail der Verbindung und Heizung. Die weißen Rohre bestehen aus Fiberglas. |
 Bild: Die Klebestellen im Detail. Damit diese auch dauerhaft sind, wurde 3M Scotch-Weld 2216 B/A eingesetzt. |
 Bild: Die Transistoren für die Heizung |
 Bild: Der eingeklebte NTC |
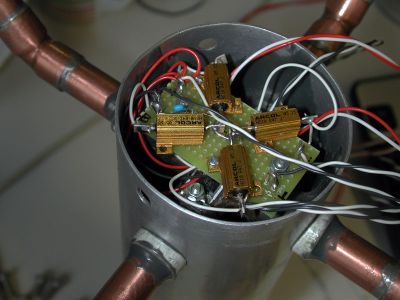 Bild: Die Shuntwiderstände der Heizung |
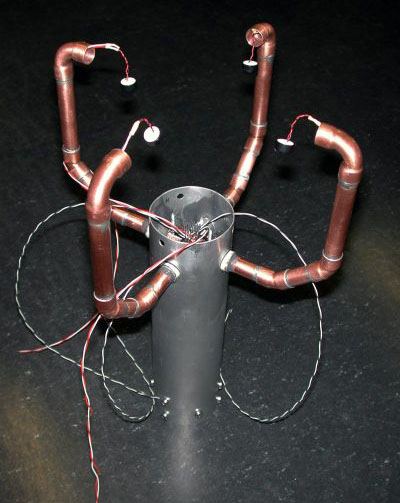 Bild: Kurz vor Vollendung des mechanischen Aufbaus. |
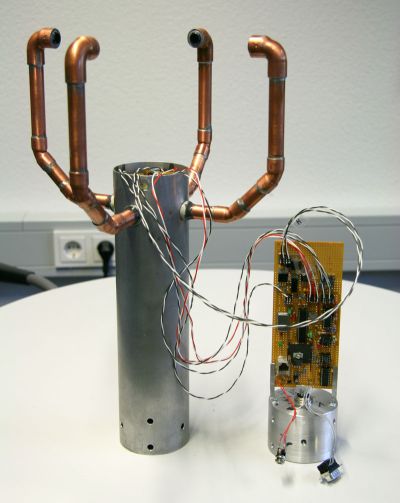 Bild: Das Gerät kurz vor dem Zusammenbau |
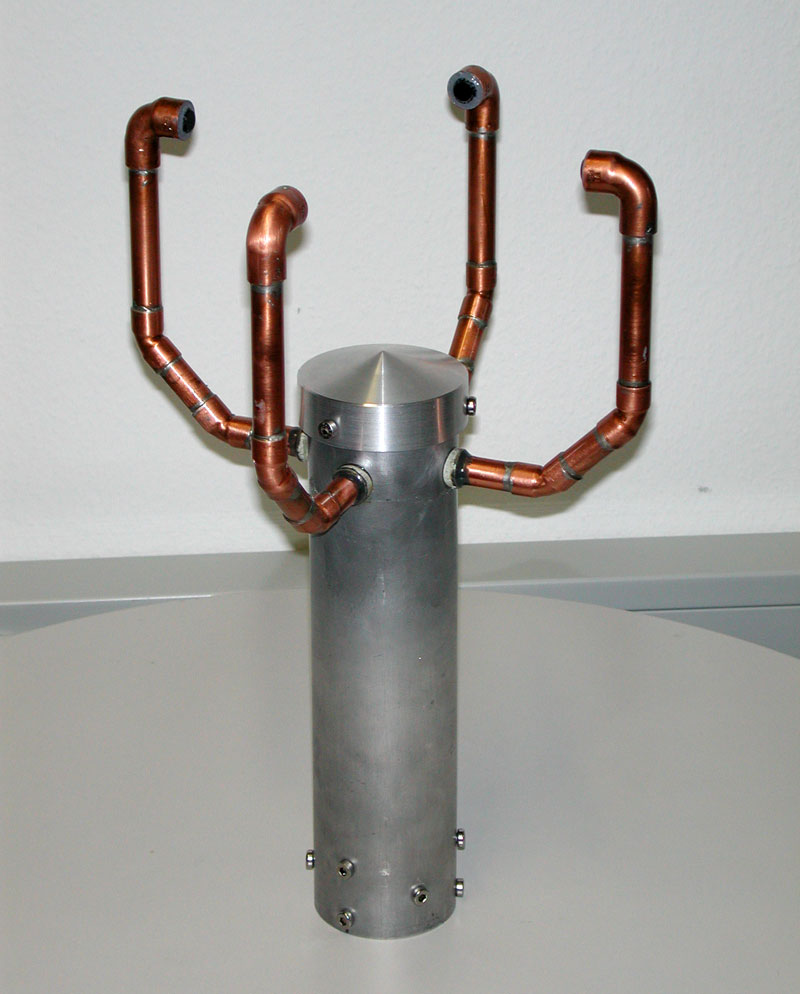
Bild: Fertiges Gerät
Die Ultraschallwandler sind mit UV-Licht-beständigem Silikon (WEICON Flex+bond) eingeklebt.
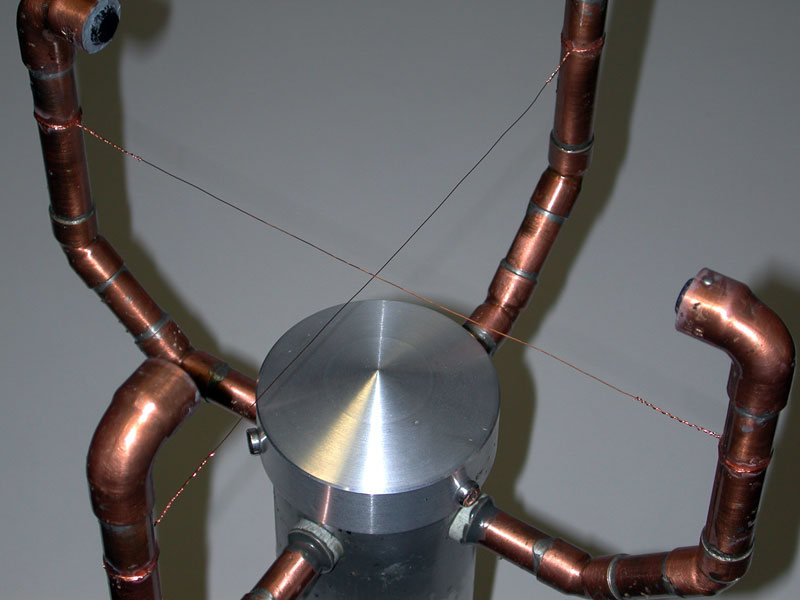
Bild: Vogelschutz
Der Vogelschutz dient zum Schutz der Ultraschallwandler vor Zerstörung durch große Vögel.
Er verhindert das Aufsitzen der großen Vögel und verhindert damit das Interesse an den Ultraschallwandlern.
Der Vogelschutz besteht aus zwei Metallbändern, die zwischen den Ultraschallgeberarmen angebracht sind.
Durch die Instabilität der Metallbänder finden große Vögel keinen sicheren Halt am Gerät.
 Bild: Der DSP-Prozessor und die Analogschaltung sind weitgehend aufgebaut. |
 Bild: Erste Messungen mit zwei Sensoren. |
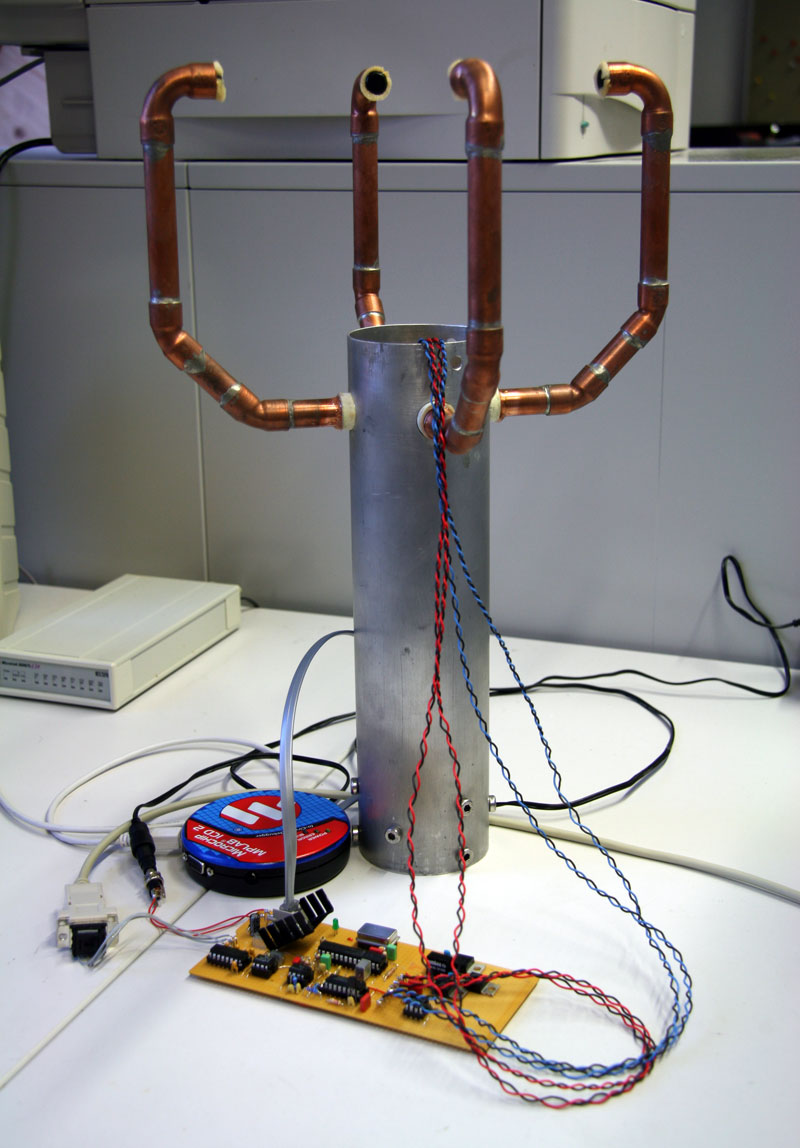
Bild: Aufbau mit provisorisch eingesteckten Schallwandler
Bild: Miniwindkanal
Seitenansicht des Windkanals für ersten Test im Labor.
Die Luft wird durch den Kanal gesaugt, damit es
weniger Turbulenzen gibt.
Der Ventilator hat eine Versorgung mit bis zu 28V bei 1,7 A. Angegeben ist er mit einer Luftleistung von 300 cfm.
Bei einem Kanaldurchmesser von 15cm wird eine Windgeschwindigkeit von bis zu 7 m/s (260 cfm) erzeugt. Diese Geschwindigkeit
ist auch einwandfrei messbar.
 Bild: Frontansicht des Windkanals. |
 Bild: Rückansicht des Windkanals. |
Gewählt wird ein hybrider Ansatz. Gemessen werden mit "Input Capture" die Zeit bis zum Mittelwert mehrerer Nulldurchgänge des Empfangssignals, nachdem dieses eine Mindeststärke erreicht hat. Es wird das Mittel aus mehreren steigenden und fallenden Nulldurchgängen berechnet. Dadurch reduzieren sich Rauschen und Versatz im Signal oder Komparator.
Die eindeutige zeitliche Zuordnung (±n*λ) der Nulldurchgänge wird durch einen adaptiven digitalen Filter bestimmt. Dabei wird das Sensorsignal digitalisiert und mit einem gespeicherten Referenzsignal, unter Verwendung der "Methode der kleinsten Quadrate" verglichen.
Durch eine reine analoge Auswertung würde die Auflösung 2 Mikrosekunde betragen, d.h., bei den 500.000 Abtastungen pro Sekunde werden also ca. 12 Abtastungen pro Wellenlänge getätigt. Dies ist zu gering, reicht aber für eine zeitliche Zuordnung der Nulldurchgänge aus. Durch die Kombination beider Verfahren beträgt die Zeitauflösung 34 Nanosekunden.
Anders ausgedrückt beträgt die Auflösung der Windgeschwindigkeit bei Raumtemperatur (20 °C) 0,02 m/s.
Die Filterung und Aufbereitung der Signale ist sehr umfangreich. Es werden folgende Mathematische Methoden angewandt:
Bild: Erste Signalaufzeichnung mit Oszilloskop.
Bild: Amplitudenverlauf mit dem A/D-Wandler (8 Bit) (28 Messungen in Vorwärts- und Rückwärtsrichtung bei Windstille) aufgezeichnet.
Bild: Amplitudenverlauf mit dem A/D-Wandler (8 Bit) (40 Messungen in alle 4 Richtungen bei ca. 18 m/s Wind in Nord-Südrichtung) aufgezeichnet.
Bild: Amplitudenverlauf mit dem A/D-Wandler (8Bit) (40 Messungen in alle 4 Richtungen bei ca. 27 m/s Wind in Nord-Südrichtung) aufgezeichnet.
Spätestens hier kann man erkennen, dass ein einfacher Amplitudenschwellwert absolut sinnlos ist.
Bild: Analyse der Frequenzen im Signal. Nach Eintreffen des Schallimpulses ist das Rauschen verschwunden. Leider lässt sich dieses nicht direkt nutzen.
Bild: Aufzeichnung der Amplituden, Nulldurchgänge und "Missmatched Filter"
Zuerst wird der Mittelwert aus mehreren Nulldurchgängen, an Stellen mit großer Amplitude, gebildet. Der Hüllkurvenfilter ermittelt die Zurodnung zum korrekten Nulldurchgang. Eine definierte Zeitspanne (n*λ) früher ist der Impuls eingetroffen.
Bild: Summe der kleinesten Quadraten ergibt ein eindeutiges Minimum.
|
Vektor h mit Nh Filterkoeffizienten Eingangsfolge u Ausgangsfolge y Gesucht ist k für das Minimum von y(k) |
Die Summe der kleinsten Quadrate wurde deshalb abgewandt, da die hochoptimierten Bibliotheksfunktionen (z.B. Korrelation) der DSP-Bibliothek nur mit 16 Bit Werten arbeiten. Der Arbeitsspeicher hat dafür aber nicht ausgereicht.
Matched Filter bieten den größten Störabstand bei weißem Rauschen mit dem Nachteil
eines geringeren Störabstands zu Seitenlinien bei Radar- oder Ultraschallanwendungen.
Um nun den Störabstand zu Seitenlinien zu erhöhen, wird ein Mismatched-Filter benutzt.
Und hier liegen die Grenzen des Systems. Eine absolut sichere Detektion bei allen Bedingungen ist bei dieser geringen Bandbreite einfach nicht möglich. Eine Lösung gelingt nur durch eine größere Bandbreite und Pulskompression. Lesen Sie mehr dazu bei der Weiterentwicklung.
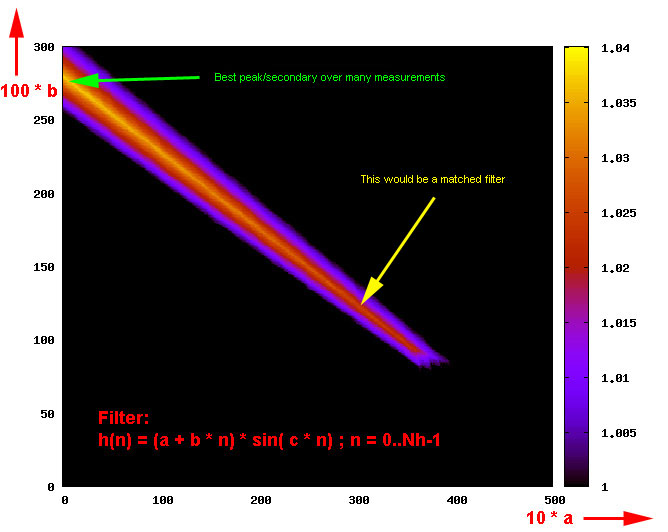
Bild: Optimierung des Mismatched-Filters auf besten Störabstand gegenüber Seitenlinien.
Weitere Informationen zu Mismatched-Filter finden Sie in "Albrecht Ludloff: Praxiswissen Radar und Radarsignalverarbeitung".
Bild: Variable Filterkoeffizienten des adaptiven Filters.
Bild: Windvektor v, Schallvektor c
Die einfache Darstellung unter "Windgeschwindigkeit- und Richtung" gilt streng genommen nur bei Windstille. Sobald der Windvektor einen nennenswerten Betrag gegenüber der Schallgeschwindigkeit angenommen hat, wird die Temperaturmessung beeinflusst. Der Schall hat einen längeren Weg zurückzulegen indem der jeweils orthogonal zur Messrichtung wehende Wind den Schall ablenkt. Das führt zu einer Vergrößerung der Laufzeit und damit zu einer scheinbaren Verringerung der Temperatur. Diese Beeinflussung ist windrichtungs- und windgeschwindigkeitsabhängig und ist durch die folgende Berechnung zu korrigieren:
Cx_real = Cx_gemessen / cos( arctan(|Vy| / Cx_gemessen) )
mit
Cx = Schallgeschwindigkeit in X-Richtung, |Vy| = Betrag der Windgeschwindigkeit in Y-Richtung
Cy_real = Cy_gemessen / cos( arctan(|Vx| / Cy_gemessen) )
mit
Cy = Schallgeschwindigkeit in Y-Richtung, |Vx| = Betrag der Windgeschwindigkeit in X-Richtung
Oder direkt in Temperaturen ausgedrückt:
Tv_x_korrigiert = ( Cx_gemessen2 + Vy2 ) / 402,31466 - 273,15
with
Cx = Schallgeschwindigkeit in X-richtung [m/s], Vy = Windgeschwindigkeit in Y-Richtung [m/s] und T = Akustische Virtuelle Temperatur [°C]
Tv_y_korrigiert = ( Cy_gemessen2 + Vx2 ) / 402,31466 - 273,15
with
Cy = Schallgeschwindigkeit in Y-richtung [m/s], Vx = Windgeschwindigkeit in X-Richtung [m/s] und T = Akustische Virtuelle Temperatur [°C]
Nach der Korrektur sollten die gemessenen Schallgeschwindigkeiten und damit Temperaturen in X-Richtung und Y-Richtung identisch sein!
Achtung: Dies wird ebenfalls beim Kalman-Filter berücksichtigt!
Bild: Betrag der Windgeschwindigkeit bei Windstille
Messung der Windgeschwindigkeit (in eine Richtung) bei Windstille [in m/s] ohne Mittelung.
Ob wirklich Windstille im Zimmer war, ist nicht ganz sicher. Die Werte könnten sogar
fehlerlos sein.
Es sind ca. 5000 Zyklen je 4 Messungen sehen. Das entspricht mit dem Debug-Code etwa 50 Sekunden.
Bei entsprechender Mittelung steigt die Präzision durch geringeres Rauschen noch etwas an.
Bild: Temperatur
Messung der Temperatur [in °C] zum gleichen Zeitpunkt ebenfalls ohne Mittelung.
Bei entsprechender Mittelung steigt die Präzision durch geringeres Rauschen noch etwas an.
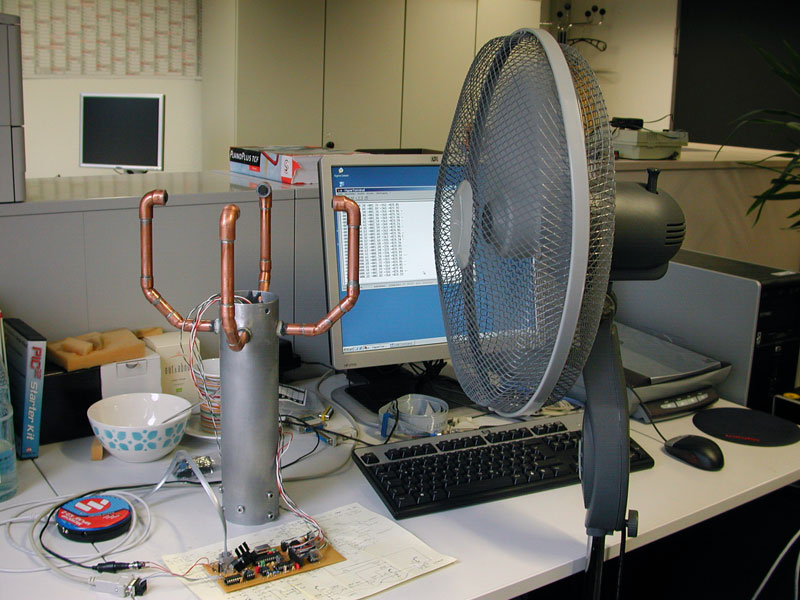
Bild: Versuchsaufbau mit einem Ventilator als Windquelle.
Bei diesem Versuch wurde das Ultraschall-Anemometer innerhalb von ca. 48 Sekunden einmal um die eigene Achse gedreht. Der Ventilator dient als Windquelle, welche ein sehr turbulentes Windfeld erzeugt.
Den Verlauf der Richtung kann man schön erkennen und das innerhalb der 2400 kompletten Messungen (=19200 Einzelmessungen) kein einziger Fehler aufgetreten ist.
Bild: Gemessener Temperaturverlauf
Bild: Gemessene Geschwindigkeit
Bild: Gemessene Windrichtung
Bild: Test der Heizung.
Zum Testen der Heizung wurde ein Sprung der Umgebungstemperatur von über -50 Kelvin
beaufschlagt.
Das PT1-Verhalten mit einer sehr großen Totzeit ist zu erkennen.
Das Regelungsverhalten ist nicht optimal. Aber bei Wind und Niederschlag ist das nicht so wichtig.
Die Temperatur an den Schallwandlern stellt sich letztlich auf +3 °C ein.
Es gibt zwei sinnvolle Verfahren zur Mittelwertbildung:
Das Ultraschall-Anemometer bildet den Mittelwert je 0,25 Sekunden.
Dabei wird bei der Geschwindigkeit das Verfahren zur Bildung von skalaren Mittelwerten und bei der Windrichtung das Verfahren zur Bildung
von vektoriellen Mittelwerten genutzt.
Die Unterschiede zum jeweils anderen Verfahren sind wegen der kurzen Zeit sehr gering.
Nach Abschluss der Entwicklung steht bei einem Messgerät immer eine Kalibrierung. Ein schwieriges Unterfangen in diesem Fall.
Ein guter Teil lässt sich aber ohne Windkanal durchführen. Da die Messungen auch die Temperatur ermitteln, kann darüber auch die Windgeschwindigkeitsmessung teilweise getestet werden.
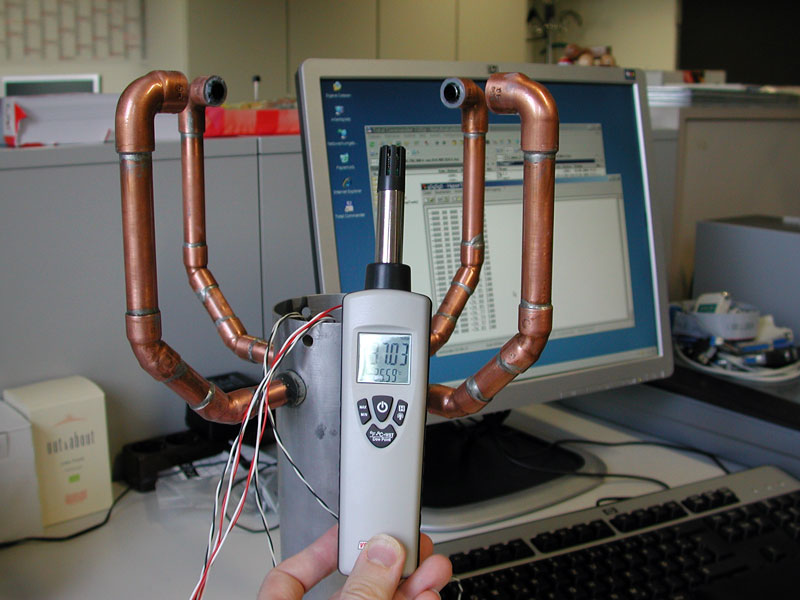
Bild: Messung der Temperatur
Vergleichsmessung der Temperatur. Hier ein Luftfeuchte- und Temperaturmessgerät.
Bei Laborbedingungen (ohne Wind) stimmen die Messungen der Virtuellen Temperatur besser als ±0,5 K.
Zur Erinnerung: Wenn die gemessene Temperatur um 6 Kelvin abweicht beträgt der Messfehler bei der
Windgeschwindigkeit 1%.

|

|
Bild: Temperaturtest in einer Kühltruhe herunter bis -30 °C

Bild: Messung im Raum
Dieser Seminarraum wurde für die Windstille und Temperaturmessungen benutzt.
Ein Thermisches Gleichgewicht war aber noch nicht
vollständig gegeben, so dass eine geringe Luftbewegung durch Konvektion nicht auszuschließen war.
Bild: Temperaturmessung (60 Sekunden = 240 Messwerte) mit Mittelwertbildung (1/4 Sekunde) im Zimmer.
Bild: Der Windvektor (60 Sekunden = 240 Messwerte) zur gleichen Zeit im Zimmer bei fast Windstille.
Das Rauschen ist deutlich kleiner als 0,01 m/s rms.
Das Rauschen ist so gering, dass kein Unterschied zwischen vektoriellen- und skalaren Mittelwert auftritt.
Mein Auto mit dem gezeigten Aufbau eignet sich hervorragend als Windkanal. Die Luftströmung scheint gänzlich unbeeinflusst und laminar. Das Problem ist die ausreichende Windstille.

Bild: Auto als Behelfswindkanal
Das Bild zeigt den Behelfswindkanal in Form eines fahrenden Autos bei Windstille.
Der Fiberglasmast ist 3 Meter hoch. Bei der Messung werden gleichzeitig die Geschwindigkeit
des Autos mit GPS und die Winddaten aufgezeichnet.

Bild: Datenaufzeichnung bei der Messung.

Bild: GPS im Auto
Die Fahrzeuggeschwindigkeit wird mit GPS erfasst. Dabei wird das "Text Out"-Format vom Garmin-GPS verwendet.
Dieses gibt u.a. die Geschwindigkeit in den drei Raumvektoren getrennt mit einer Auflösung von 0,1 m/s jede Sekunde erneut aus.
Bild: Auszug einer Logdatei bei einer Testfahrt
Bedeutung der Spalten 1: Zeit (UTC), 2: Geschwindigkeit ermittelt mit GPS [m/s], 3: Geschwindigkeit Windmesser [m/s], 4: Windrichtung [°], 5: Virtuelle Temperatur Windmesser [°C], 6: Anzahl gültiger Messungen in 1/4 Sekunde (max. 25), 7: Anzahl interne Korrekturen Typ. V (debug), 8: Anzahl interne Korrekturen Typ C (debug), 9: Anzahl Fehler Temperaturunterschied X und Y, 10: Anzahl Fehler durch zu schnell sich ändernde Temperatur, 11: Anzahl Streckenausfall X, 12: Anzahl Streckenausfall Y, 13: Temperatur im Messarm Nord (für Heizung), 14: Heizstrom [mA], 15: Echtzeit wenn > 0 (debug)
Durch die Zusammenarbeit mit einem renommierten deutschen Hersteller meteorologischer Messgeräte konnte ich dessen professionellen Windkanal nutzen.
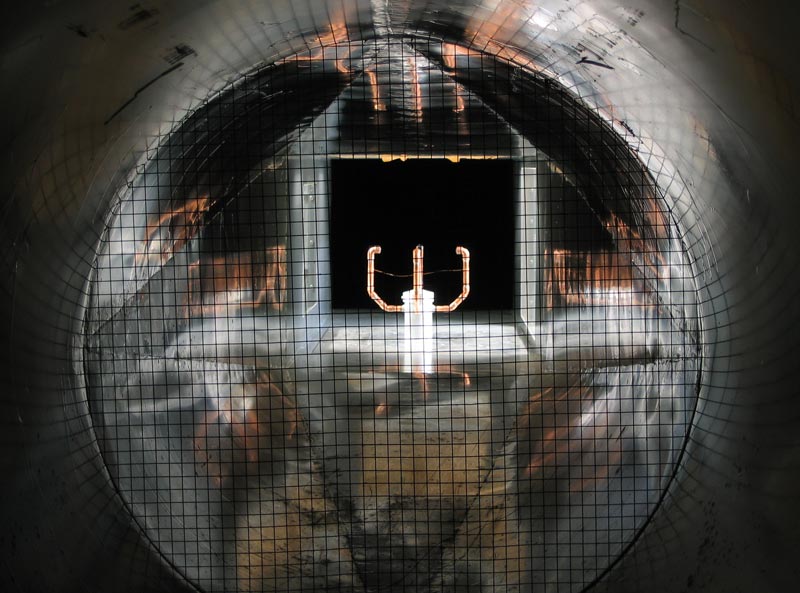
Bild: Blick durch den Windkanal auf den Windmesser.

Bild: Windmesser im Windkanal.

Bild: Blick längs des Windkanals.
Die Messung und Korrektur der windrichtungs- und geschwindigkeitsabhängigen Abschwächung bei einem Ultraschall-Anemometer stellt eine große Herausforderung dar.
Gerade die mechanischen Abmessungen des gewählten Aufbaus zeigen sich hier als ungünstig. Es sind deutliche Korrekturen notwendig.
Die folgend dargestellten Werte sind durch die Kalibrierung mit dem Behelfswindkanal in vielen Stunden ermittelt worden.
Es wurde ca. 150 Km Wegstrecke mit dem gezeigten Fahrzeugaufbau zurückgelegt!
Faktor a(φ) der windrichtungsabhängigen Korrektur als Diagramm (oben ist Norden)
Mit den Werten, die im professionellen Windkanal gewonnen wurden, lässt sich diese Korrektur weiter verfeinern.
Die gewählte Bauform liegt nahe an den Eigenschaften des in der Literatur [5] beschriebenen Typs (ATI-type; Kaimal and Gaynor, 1983).
Mit den Windkanaldaten und Nutzung der Literatur [1] ergibt sich eine Gleichung:
Vm/Vt = 1 - (β * Um-γ) * (57 - φ) / φ , (0 ≤ φ ≤ 57) , β=0.61 , γ = 0.335
Vm/Vt = 1 , (57 < φ ≤ 90)
Bild: Faktor Vm/Vt (Vm,φ) der Windrichtungs- und Windgeschwindigkeitsabhängigen Korrektur.
Hier die Literaturstellen dazu (leider nicht alle kostenlos und die Adressen ändern sich):
Die Windrichtung wird mit den korrigierten Werten iterativ berechnet.
Ein halbes Jahr war der Windmesser auf einem ca. 30m hohen Mast aufgebaut.

Bild: Windmesser im Herbst

Bild: Im Winter hält die Heizung das Anemometer eisfrei. Nur der Vogelschutz ist Eis überzogen.
Bild: Messung der Windgeschwindigkeit (24 Stunden) mit dem Ultraschall-Anemometer (Böen 3 Sekunden nach WMO).
Bild: Messung der Windgeschwindigkeit mit einem Schalen-Anemometer zum Vergleich (Böen 1 Sekunde nicht nach WMO).
Bild: Vergleich der angezeigten Windrichtungen zwischen dem Ultraschall-Anemometer und einer Windfahne (gleicher Zeitraum 24 Stunden).
Auf den Grafiken kann man leicht die Unzulänglichkeiten eines mechanischen Systems in Form der Anlaufwerte erkennen. Das Ultraschall-Anemometer arbeitet einwandfrei.
Stand am 9.04.2009 nach über einem halben Jahr und 8.100.000.000 (Acht-Komma-Eins-Milliarden) Messungen:
Das Ultraschall-Anemometer arbeitet ohne Fehler einwandfrei.
Zum Vergleich arbeitet ein Schalen-Anemometer.
Der Korrelationsfaktor der Minutenmittelwerte: 0,9998.
Der Korrelationsfaktor der 3-Sekunden-Böe (je Minute): 0,9994.
Höchste/niedrigste Virtuelle Temperatur: 28,7 °C / -11,2 °C.
Das Projekt war sehr viel schwieriger als ich zuerst angenommen habe. Aber das Ergebnis finde ich ausgezeichnet.
Die angestrebte Genauigkeit und alle mechanischen und elektrischen Eigenschaften der Spezifikation wurden erreicht.
Das bedeutet jetzt nicht, dass alle wünschenswerten Eigenschaften restlos vorhanden sind.
Es gibt also genug Eigenschaften, die in der Spezifikation nicht auftauchen!
Die extreme Güte der Schallwandler lässt mit dieser Elektronik keine weitere Signalformung zu. Das führt zu einer nur begrenzten Sicherheit der Detektion der Hüllkurve, die durch eine digitale Nachbearbeitung mit einem Kalman-Filter abgesichert werden muss. Und darin liegt auch ein wesentliches Problem beim Start oder bei Unterbrechung der Messung.
Für den ersten Prototyp ist es jedoch schon sehr gelungen. Es bleiben also noch genug Verbesserungsmöglichkeiten.
Translation into English language.
Es sind nun etliche Jahre vergangen und inzwischen sind zahlreiche Ultraschall-Windmesser teilweise schon günstig erhältlich. Aber der Reiz des Besonderen ist noch nicht ganz verflogen.
Weitere erfolgreiche Aufbauten von Privatpersonen oder Hochschulen habe ich bisher noch nicht gefunden.
Es gab noch genug zu verbessern und jetzt die Möglichkeit einen institutseigenen Windkanal zu benutzten. Das gibt mir wieder Antrieb einen verbesserten Prototyp zu erstellen.
Bild: Schallausbreitungspfade
Trennung von direktem und indirektem Schall bei Schallwandlern mit großem Abstrahlwinkel.
Bei den nun weiterhin eingesetzten Schallwandlern mit 40 KHz ist der Abstrahlwinkel sehr groß. Das führt zu einer Überlagerung des direkten und indirekten Schalls. Um nun diesen wieder trennen zu können, muss der Weg über den Reflektor wesentlich länger als der direkte Weg sein. Das führt zu einem sehr hohen Reflektor und damit zu einem sehr spitzen Winkel α des Schallausbreitungsweges. Wenn der für die Messung eigentlich genutzte indirekte Schall eintrifft, muss der direkte Schall bereits vollständig abgeklungen sein. Je spitzer der Winkel α jedoch ist umso geringer ist die Änderung der Laufzeit durch den Wind.
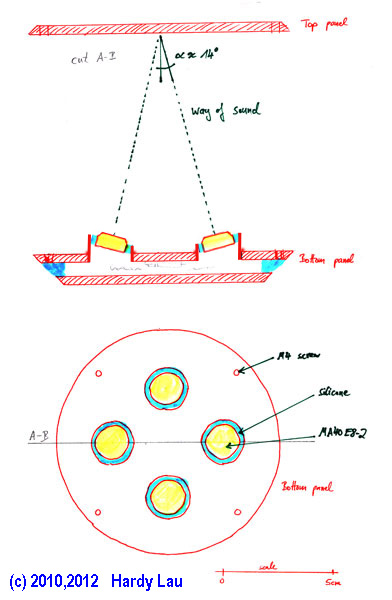 Bild: Skizze des neuen mechanischen Konzepts zur Verringerung der Turbulenz. Es muss nur die untere Platte beheizt werden. |
 Bild: Zweiter Prototyp mit Messung über Reflektor. |
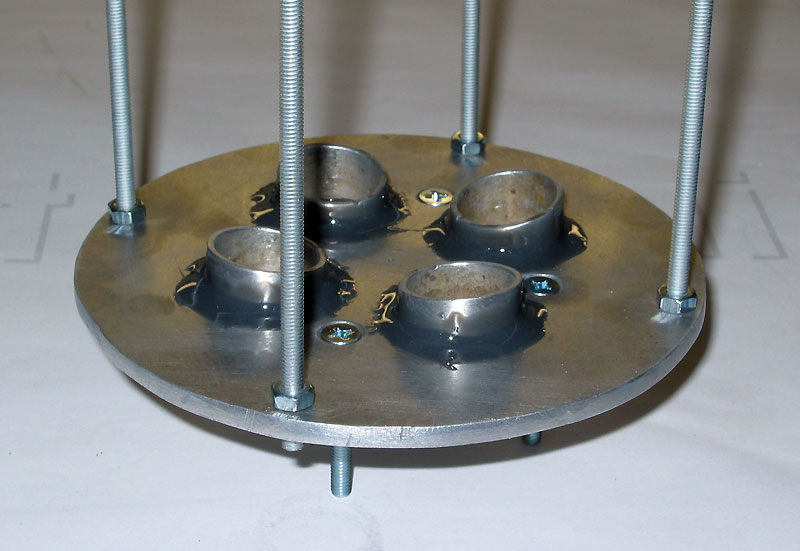
Bild: Detailbild der Grundplatte
Die Rohrstutzen aus Aluminium sind wegen der besseren Wärmeleitfähigkeit in die Grundplatte eingelötet.
Da die Aluminiumlötung nicht ganz perfekt gelungen ist, sind die Lötstellen mit
3M Scotch-Weld 2216 B/A zusätzlich abgedichtet.

Bild: Detailbild der Schallwandleranordnung
Mit dieser neuen Befestigung der Schallwandler gibt es auch bei starken Regen keine Probleme.
Die Ultraschallwandler sind mit diesmal durchsichtigen und UV-Licht-beständigen Silikon
(WEICON Flex + bond)
in die Stutzen der beheizbaren Grundplatte in Schallausbreitungsrichtung geneigt eingeklebt.
Die Ultraschallsignale sind, bei dieser Befestigung und Anordnung der Ultraschallwandler, ausgezeichnet.
Wie sich später zeigte, ist das Einhalten des Einbauwinkels wichtig. Andernfalls ergibt sich eine Unsymmetrie, welche mit einer aufwendigen Kalibrierung ausgeglichen werden muss.

Bild: Gehäuse ohne Messeinrichtung.
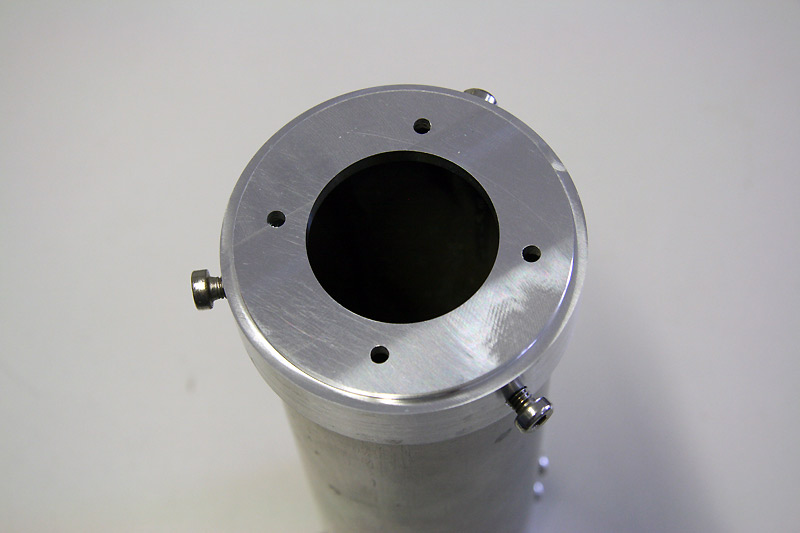
Bild: Obere Platte zur Befestigung der Messeinrichtung.
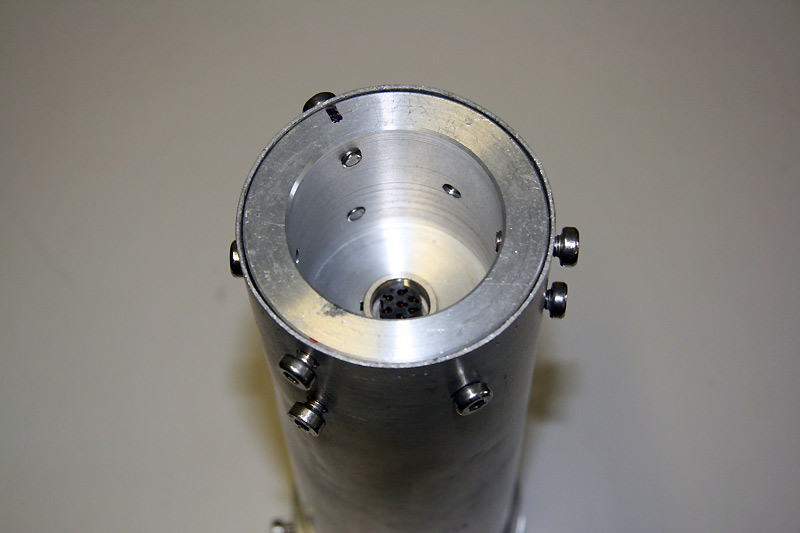
Bild: Die Masthalterung zum Aufsetzen auf einen 50mm-Mast mit Steckverbindung.
Bild: Neuer Schallausbreitungsweg über Reflektor.
Bei diesem neuen Entwurf breitet sich der Schall direkt und gleichzeitig indirekt über den Reflektor aus. Der spitze Winkel dient dazu, den direkten vom indirekten Schall zeitlich zu trennen. Der zu messende Wind begünstigt oder vermindert dabei nur anteilig die Laufzeit der Schallsignale abhängig vom Winkel α.


mit Abstand d zwischen Wandlern und Reflektor, Schallgeschwindigkeit c, Winkel α,
Windgeschwindigkeit v, Laufzeit des Schalls vorwärts tforward und Laufzeit des Schalls zurück tback.

mit Abstand d zwischen Wandlern und Reflektor, Schallgeschwindigkeit c, Winkel α, Windgeschwindigkeit v,
Laufzeit des Schalls vorwärts tforward und Laufzeit des Schalls zurück tback.
Daher ist das Rauschen entsprechend auch größer. Der optimale Winkel wäre 45 Grad, wenn der direkte Schall dann nicht stören würde. Ein wesentlicher Vorteil ist, dass der Wind fast ungehindert von den Schallwandlern ist und die Luftwirbel des Sendeschallwandlers den Empfängerschallwandler nicht direkt trifft. Der Winkel zwischen Wind und den Flächen der Schallwandler bleibt immer Spitz.
Die weiteren Berechnungen für die gesamte Windgeschwindigkeit- und Richtung sind dieselben wie beim ersten Prototyp. Bitte lesen Sie im oberen Teil nach.
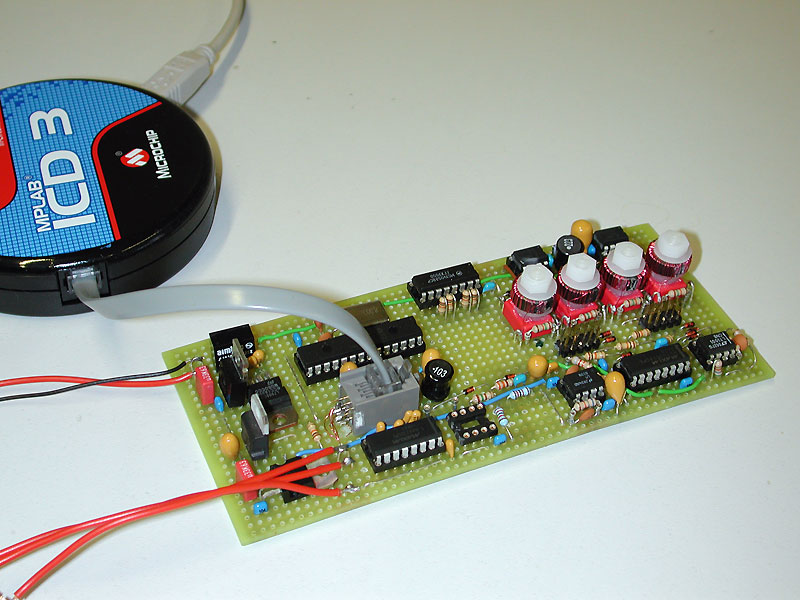
Bild: Neue Elektronik
Die neue Elektronik (mit Microchip dsPIC33fj128mc802 als neuen Prozessor).
Auffällig sind die vier Transformatoren oben rechts. Zusammen mit den Treiberstufen sind das die größten Änderungen gegenüber dem Vorgänger.
Der Mikroprozessor bietet diesmal 34 MAC/MIPS Rechnerleistung und einen 12-Bit-A/D-Wandler mit 500.000 Abtastungen pro Sekunde. Auf die analoge Nulldurchgangserkennung verzichte ich dieses Mal. Der A/D-Wandler wird jetzt durch einen DMA-Kanal unterstützt. Es gibt bis zum Ende der Messung überhaupt keinen Interrupt. Auch der Hauptspeicher ist mit 16 KB, und davon 2 KB DMA-Speicher, mehr als ausreichend. Die jetzt noch komplexere Signalerzeugung wird wieder elegant mit dem eingebauten PWM-Generator bewerkstelligt.
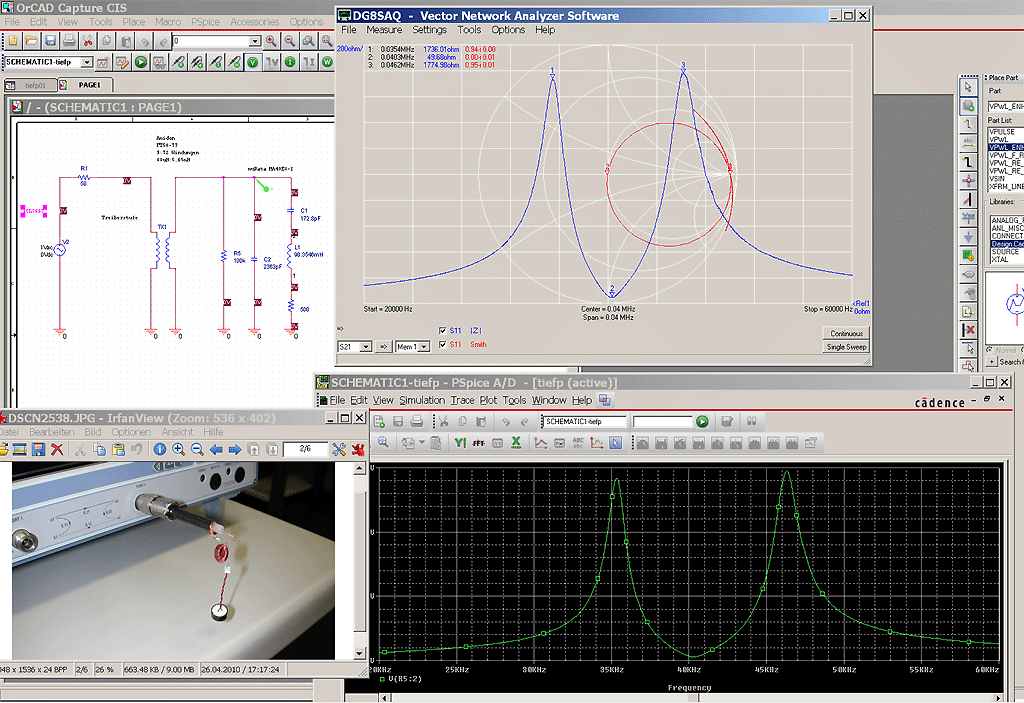
Bild: Simulation und Messung
Simulation und Messungen gehen Hand in Hand bei der neuen Entwicklung...
Ganz wesentlich neu ist die Anpassung der Schallwandler und damit die größere Bandbreite. Dadurch
ergeben sich neue Möglichkeiten in der Signalformung und in der Signalverarbeitung.
Die Übereinstimmung zwischen Simulation mit PSPICE und der Messung ist dabei schon verblüffend. Auch die Simulation der resultierenden Empfangssignale ergibt eine extrem gute Übereinstimmung zur Messung.

Bild: Schallwandler muRata MA40E8-2
Es klingt so einfach. Man nimmt einen wasserdichten Schallwandler und gut. Weit gefehlt!
Bei näherer Betrachtung fällt die extreme Nutzung dieses Schallwandlers bei diesem Projekt auf.
Der MA40E8-2 ist für den Einsatz als Abstandswarner bei Pkws gedacht. Dort müssen Abstände im Bereich 20cm bis 150cm erkannt werden. Die Auflösung oder die Genauigkeit soll dabei im Bereich ±10 cm liegen. Die Wellenlänge einer Schallwelle (40 KHz) in Luft liegt bei ca. 9mm. Daher ist die Güte dieses Schallwandlers sehr hoch, d.h. die Bandbreite sehr gering. Zusätzlich ist der Abstrahlwinkel mit ca. 90° extragroß damit wenige Schallwandler an der Stoßstange ausreichen.
In dieser Anwendung hier ist der Abstand konstant und es wird die Laufzeit gemessen. Aber die Windgeschwindigkeit wird in einer Auflösung von 0,05 m/s (rms) gemessen. Das ergibt bei Raumtemperatur, dem spitzen Winkel und einem Abstand von ca. 10 cm zwischen den Schallwandlern und dem Reflektor eine Distanz von ca. 0,07 mm. Ein sehr kleiner Abstrahlwinkel wäre für den zweiten Prototyp auch sehr von Vorteil.
Und dabei ist die Genauigkeit, die hier erzielt wird noch höher. Denn diese ist ja einschließlich der Verfälschung durch die Turbulenz in der sich schnell bewegenden Luft. Man kann eine fast unglaubliche Genauigkeit mit diesen einfachen Schallwandlern erreichen!
Und warum das alles?
Geeignete Schallwandler sind in kleinen Stückzahlen und bezahlbarem Preis nicht erhältlich. Daher die
großen Anstrengungen mit diesem eigentlich sehr ungeeigneten Schallwandler.
Die Schallwandler haben entgegen der Behauptung auf anderen Webseiten ein Metallgehäuse.
Mit dem Vektor-Netzwerk-Analysator (nach DG8SAQ) und dem dazugehörigen Programm lässt sich das Ersatzschaltbild der Schallwandler supereinfach ermitteln. Dies ist für die Auslegung der Treiberstufe wichtig.

Bild: Selbst aufgebauter Vektor-Netzwerk-Analysator nach DG8SAQ.
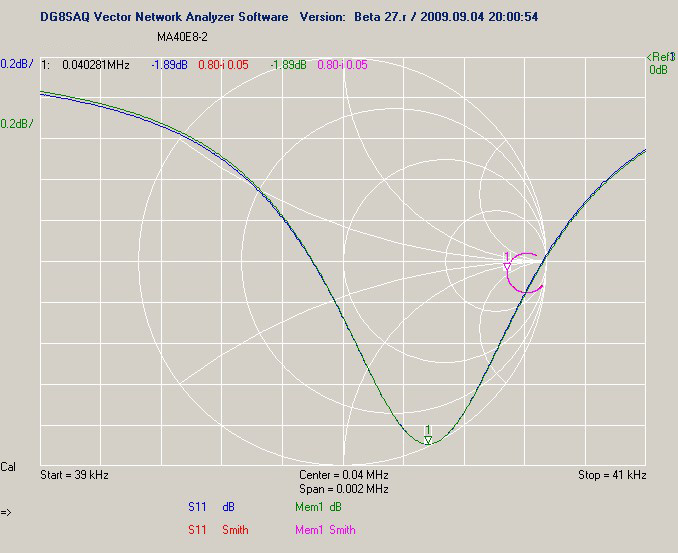
Bild: Messung S11 eines muRata MA40-E8-2 Schallwandlers.
Bild: Ersatzschaltbild des muRata MA40E8-2 Schallwandlers.
Die Sekundärinduktivität des Transformators bildet zusammen mit der Kapazität des Schallwandlers einen Parallelresonanzkreis. Die Frequenz dieses Parallelresonanzkreises soll dabei gleich der Frequenz der Schallwandler sein.
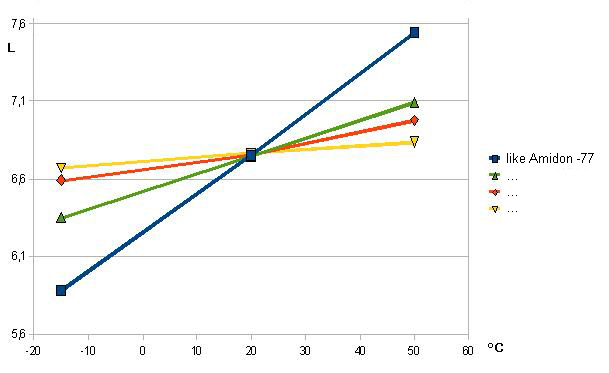
Bild: Sekundärinduktivität des Transformators
Wie schon oben angedeutet ist die Temperaturabhängigkeit der Sekundärinduktivität des Transformators ein Problem. Diesen Zusammenhang hat ein guter Freund genauer untersucht und dieses Diagramm angefertigt. Den Typ des Transformators den ich jetzt verwenden werde, zeigt die gelbe Kurve (die Angabe des Typs habe ich absichtlich entfernt).
Die Versuche haben die Beeinträchtigungen der Signale durch die sich verändernde Sekundärinduktivität deutlich gezeigt. Die Signalverarbeitung hat aber im gesamten Bereich von -20 °C bis +60 °C trotzdem funktioniert.
Bild: Auszug aus dem neuen Schaltplan.
Die Treiberseite wurde von der Empfängerseite konsequent getrennt. Dadurch konnte die Mute-Schaltung entfallen. Die Treiberstufen sind mit resonanten Transformatoren genau an die Schallwandler angepasst. Die analoge Nulldurchgangserkennung ist entfallen. Der Schaltplan und die Simulation sind nun mit OrCAD erfolgt. Das würde auch eine Platinenerstellung sehr vereinfachen.
Die Korrelation vereinfacht die Signalverarbeitung erheblich. Sie dient zur Überwachung der durch den Mismatched Filter gewonnen Daten. Das System benötigt keinen Kalman-Filter.
Das Erstellen der Koeffizienten des Mismatched Filters in diesem Entwurf ist dank der Pulskompression sehr erleichtert.
Dieser Filter muss nicht mehr die Hüllkurve des Signals bewerten, sondern das Signal mit Pulskompression!.
Bild: Korrelationsantwort
Zusätzlich zum Mismatched-Filter wird eine Korrelation der Empfangssignale (Bild) benutzt. Damit kann die Temperatur nicht bestimmt werden aber es ist eine Sicherheit bei der Bestimmung der Windgeschwindigkeit.
In den weiteren Diagrammen zur Korrelation hat die Abszisse immer den Bereich bis 524. Das kommt von 512 Abtastwerten (1024 ms), von denen die ersten 250 einfach entfallen da dort noch keine Nutzsignale auftreten können. Bei zwei Eingangsfolgen der Korrelation (Hin- und Rückweg) entstehen 524 Ausgangswerte. Diese sind jeweils dargestellt. Die Werte der Korrelation sind jeweils normiert, d.h. das Maximum ist 1.
In dieser Version ist der schnelle Komparator entfallen. Um eine bei nur 500.000 Abtastungen pro Sekunde ausreichende Auflösung zu erreichen, wird eine Lineare Interpolation zur Bestimmung der Nulldurchgänge genutzt. Lineare Interpolation da SIN(x) ~ x für kleine x.
Bild: Interpolation
Die Auflösung der Windgeschwindigkeit kann dabei trotzdem größer sein als durch die Abtastgeschwindigkeit des A/D-Wandler vorgegeben. Dazu wird wieder der Mittelwert einer linearen Interpolation mehrerer Nulldurchgänge des Signals benutzt. Die Anzahl und Auswahl der Nulldurchgänge wird dabei wieder so gemacht, dass sich ein möglicher Offset und Jitter, bedingt durch Überlagerungen, aufhebt. Das obige Bild zeigt die Abtastwerte zeitlich richtig, d.h. es gibt genau 12,5 Abtastungen je Schwingung.
A ist die Amplitude des Abtastpunkts 7, B ist die Amplitude des Abtastpunkts 8.
Der Nulldurchgang findet dann bei Abtastpunkt 7 + A/(A+B) statt.
Möglich wurde dieses unter anderem durch die mit 12 Bit wesentlich größere Auflösung der Amplituden. Bei der ersten Version mussten die Amplituden, bedingt durch den geringen Speicher, ja sogar auf 8 Bit Auflösung reduziert werden.
Diese Version des Ultraschall-Anemometer bildet den Mittelwert je Sekunde.
Dabei wird bei Geschwindigkeit und Windrichtung das Verfahren zur Bildung von vektoriellen Mittelwerten genutzt.
Dadurch wird der Nachteil der ungünstigen Geometrie mit dem Spitzen Winkel zur Windrichtung wieder weitgehend kompensiert.
Um das Rauschen noch weiter zu reduzieren, werden ca. 10% der größten und 10% kleinsten Messwerte mit einem Medianfilter bei der Mittelwertbildung unberücksichtigt gelassen. Kleinere "Ausreißer" sind damit entfernt.
Bild: Korrelationsantworten verschiedener Anregungssignale
Bei der Korrelation kann nun vor der größeren Bandbreite der profitiert werden. Verschiedene Formen des Sendesignals (Stichworte: Pulskompression, Barker-Code) ergeben Korrelationsantworten mit mehr oder weniger Abstand zu den Seitenlinien. Das obige Bild zeigt eine wesentliche Verbesserung gegenüber der Filterantwort des besten Mismatched-Filters bei der ersten Version des Ultraschall-Anemometers. Die zugehörigen Sendesignale zeige ich hier mit Absicht nicht.
Diese Korrelation muss nicht mehr die Hüllkurve des Signals bewerten, sondern das Signal mit Pulskompression!
Es sind noch weitere Verbesserungen beim Sendesignal möglich. Diese erfordern aber eine erweiterte dynamische Anpassung zur Laufzeit. Bis auf eine Anpassung der Frequenz an den Temperaturgang der Schallwandler verzichte ich bisher darauf.
In einem Messablauf werden jetzt verschiedene Pulsformen genutzt. Jede hat ihre speziellen Vorteile. Eine hat eine gute Phasenstabilität des Empfangssignals, die obige eine gute Unterdrückung der Nebenlinien bei der Korrelation der Empfangssignale.
Bild: Korrelationsantwort
Die Animation zeigt die normierte Korrelation der Empfangssignale bei Windgeschwindigkeiten von -30 m/s bis +30 m/s in Schritten von 5 m/s. Die Lufttemperatur beträgt ca. 21 °C. Der Abstand zu den Seitenlinien ist bei allen Windgeschwindigkeiten mehr als ausreichend.
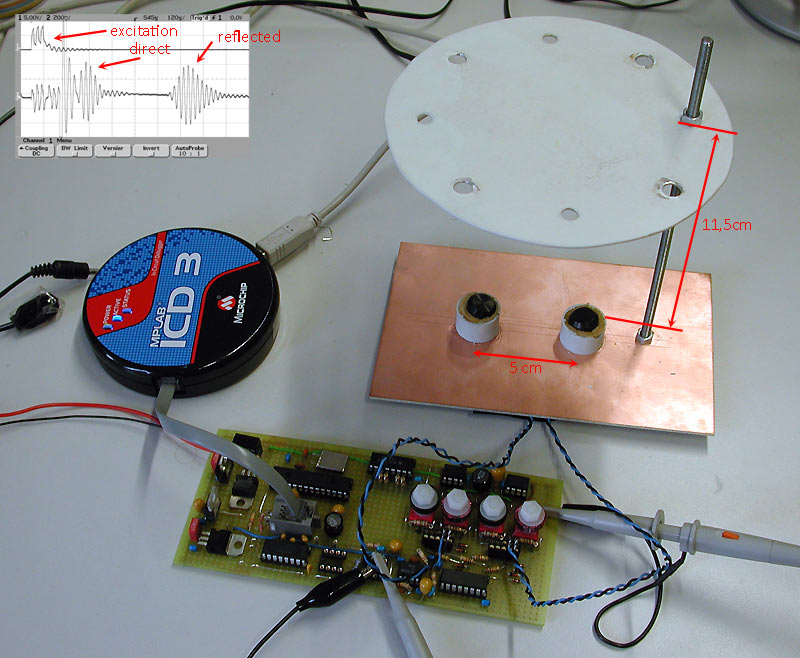
Bild: Erster Laboraufbau
Erste Tests mit dem neuen Aufbau und neuer mathematischer Signalverarbeitung.
Als Debugger kommt jetzt das schnellere MPLAB ICD3 von Microchip zur Anwendung.
Bei einem genauen Blick auf das Signal im obigen Bild kann man gleich den gewaltigen Unterschied feststellen.
Die Schallwandler sind ja jetzt liegen eingebaut. Was passiert eigentlich bei Regen?
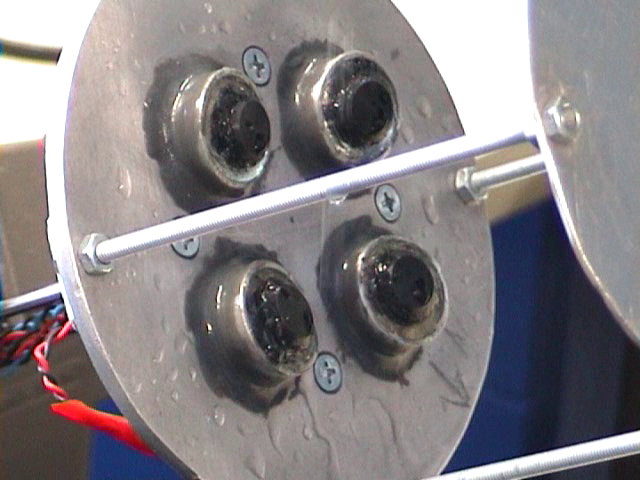
Bild und Film: Regenversuch
Dieses Video (20 MB, WMV) zeigt den Regenversuch. Dazu wurden die Schallwandler direkt mit Wassertropfen beschickt.
Bild: Gemessene Windgeschwindigkeit bei Regen.
Die Beeinflussung durch Regentropfen ist denkbar gering und nur von kurzer Dauer. Bei Schneefall werden die Schallwandler und die untere Platte zusätzlich beheizt.

Bild: Neuer Windkanal
Dieser kleine GUNT Windkanal HM 170 (2.25 KW, ~28 m/s 292mm*292mm) steht seit Herbst 2010 für die Entwicklung zur Verfügung. Datenblatt des Windkanals.
Dieser neue Windkanal war der Anlass nochmals einen Windmesser zu entwerfen. Wenn dieser Windkanal auch sehr klein ist, kann damit hundertfach einfacher und schneller entwickelt werden als mit den Möglichkeiten in den Jahren zuvor. Aus Monaten Arbeitszeit werden Stunden!
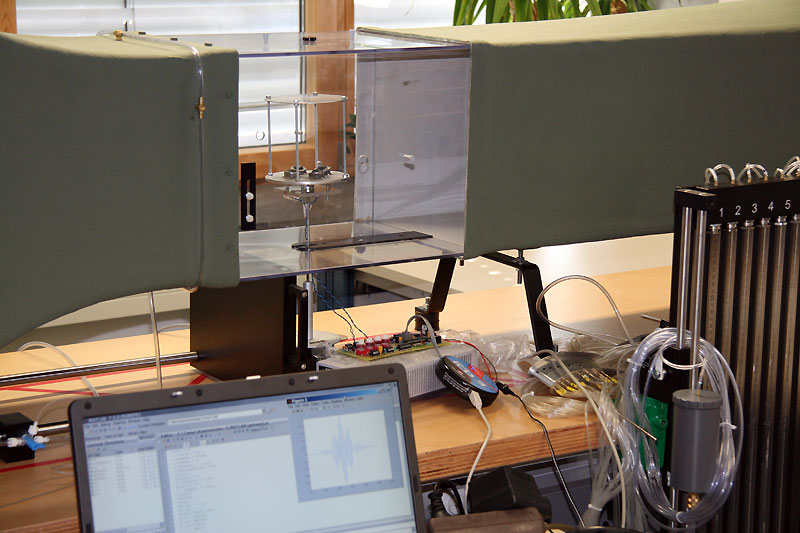
Bild: Zweiter Prototyp des Windmessers bei Tests im Windkanal (Frühjahr 2012).
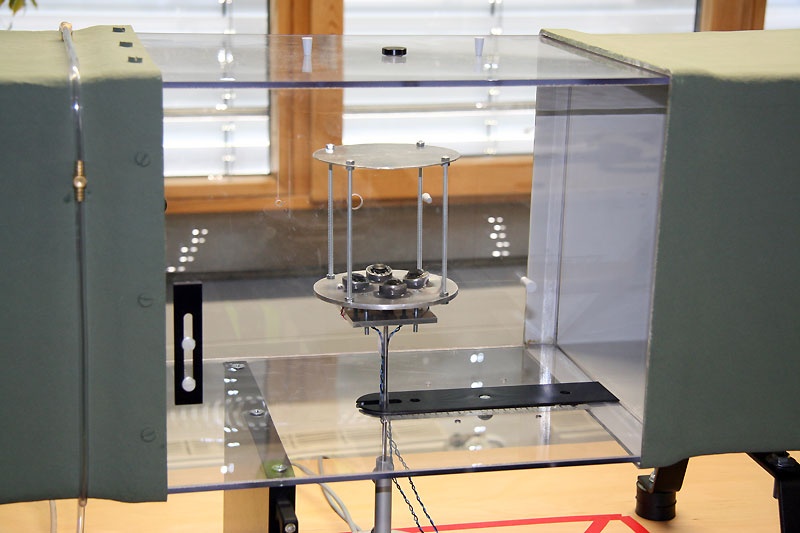
Bild: Zweiter Prototyp des Windmessers bei Tests im Windkanal (Frühjahr 2012).
Bild und Film: Windmesser bei einer Messung im Windkanal
Das Video (10MB, WMV) zeigt den Windmesser bei einer Messung im Windkanal.
Der Gehörschutz liegt da nicht sinnlos herum!
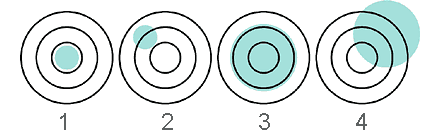
Bild: Präzision, Richtigkeit und Genauigkeit
Die Präzision ist ein Maß für die Übereinstimmung zwischen unabhängigen Messergebnissen unter festen Bedingungen. Liegen also mehrere Messwerte dicht beieinander, so hat die Messmethode eine hohe Präzision. Das bedeutet aber noch nicht, dass die gemessenen Werte auch richtig sind.
Die Richtigkeit ist ein Maß für die Übereinstimmung zwischen dem aus einem großen Datensatz erhaltenen Mittelwert und dem anerkannten Referenzwert. Wenn also der Mittelwert aus vielen Messungen gut dem dem wahren Wert übereinstimmt, so ist die Richtigkeit hoch. Dies sagt nichts darüber aus, wie stark die einzelnen Werte streuen.
Die Genauigkeit ist ein Maß für die Übereinstimmung zwischen dem (einzelnen) Messergebnis und dem wahren Wert der Messgröße. Eine hohe Genauigkeit kann man also nur erreichen, wenn sowohl die Präzision als auch die Richtigkeit gut sind.
Im obigen Bild ist damit: 1 = präzise mit guter Richtigkeit, 2 = präzise mit schlechter Richtigkeit,
3 = unpräzise mit guter Richtigkeit, 4 = unpräzise mit schlechter Richtigkeit.
Die meisten Hersteller geben sehr unbestimmte Angaben zur Genauigkeit ihrer Geräte. So wird in der Regel nur der Effektivwert einer Abweichungs-Rauschleistung (rms) angegeben.
Bei einer angenommenen Gaußverteilung entspricht die Standardabweichung δ dem Effektivwert (rms).
Es sind dann also 68,3% aller Messwerte im Bereich ±δ, 95,5% aller Messwerte im Bereich ±2δ
und 99,7% aller Messwerte im Bereich ±3δ.
Ultraschall-Windmesser sind nicht sehr genau. Daher sollten Sie auch nicht zur Leistungsprognose von Windkraftanlagen eingesetzt werden.
Mit Wissen um diesen Sachverhalt sollten Sie die Angaben zur Genauigkeit dieses Gerätes und aller anderen kommerziellen Geräte betrachten.

Bild: Während der Kalibrierung
Der Windkanal bietet einen Bereich von 20cm * 20cm mit einer Windgeschwindigkeit genauer 2% bis 28 m/s.
Da die Schallwellen im Windkanal reflektiert werden, ist die Messrate während der Kalibrierung etwas reduziert. Das stört im Normalbetrieb ebenfalls nicht.
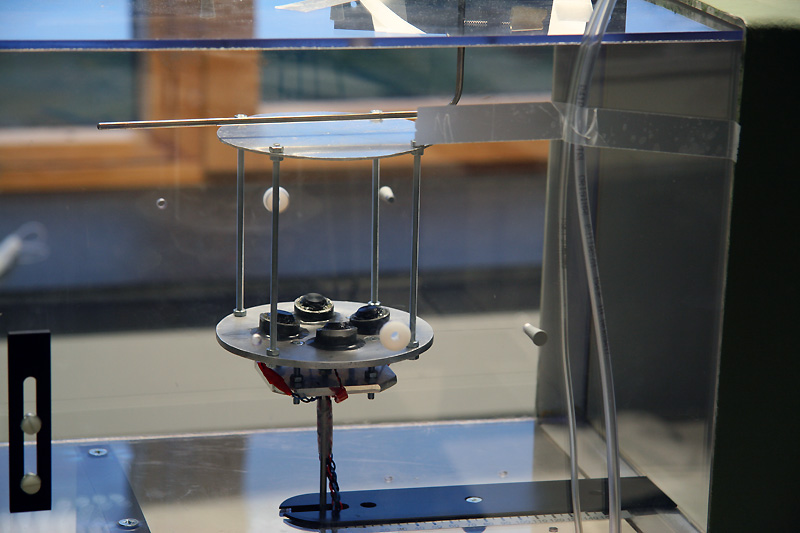
Bild: Windmesser und Prandtl-Rohr zur Vergleichsmessung
Zur Messung der Windgeschwindigkeit im Windkanal dient ein Prandtl-Rohr zusammen mit einem elektronischen Differenzdruckmesser, Barometer, Thermometer und Hygrometer.
Die Funktion, aber nicht die Genauigkeit, bis ca. 40 m/s Windgeschwindigkeit kann mit einer einsetzbaren Querschnittverkleinerung (für den Bernoulli Versuch) überprüft werden.
Bild: Gemessene Geschwindigkeit (5,10,15,20,25 m/s) über die gemessene Windrichtung.
Dieses fast schon unscheinbare Diagramm beinhaltet 360 einzelne Messungen. Selbst bei einer sehr kurzen Integrationszeit braucht man circa 1 Minute pro Messpunkt. Das sind 6 Arbeitsstunden!
Mit diesen Werten wird eine zweidimensionale Tabelle im Windmesser angelegt und nach der Messung die Werte entsprechen korrigiert ausgegeben. Dabei wird jeweils zwischen den Geschwindigkeiten und den gemessenen Windrichtungen interpoliert.
Die mechanisch geringe Präzision beim Aufbau und der kleine Abstand zwischen den Schallwandlern zusammen mit dem spitzen Winkel zwischen Wind und Schallweg schlagen sich leider in der erzielbaren Genauigkeit nieder. Die spezifizierten Werte lassen sich aber problemlos erreichen.
Bild: Messung nach der Kalibrierung
Ein Messwert pro Sekunde bei 28,1 m/s. Der Windmesser wurde langsam von Hand einmal um die Achse gedreht.
Ergebnis: Mittelwert 28,06 m/s und Standardabweichung 0,37 m/s (=1,3%).
Bild: Messung nach der Kalibrierung.
Ein Messwert pro Sekunde bei 5,0 m/s. Der Windmesser wurde langsam von Hand einmal um die Achse gedreht.
Ergebnis: Mittelwert 4,99 m/s und Standardabweichung 0,3 m/s und damit gerade noch innerhalb der Spezifikation.
Bild: Messung nach der Kalibrierung.
Ein Messwert pro Sekunde (300 Sekunden) bei Windstille.
Ergebnis: Standardabweichung 0,25 m/s.
Vermutlich einen Resonanzeffekt kann man hier Beobachten. Die Standardabweichung ist bei Windgeschwindigkeiten über 2 m/s deutlich geringer als bei absoluter Windstille.
Bild: Messung der Windgeschwindigkeit in der Hauptachse (0°).
Diese Hauptachse ist die ungenaueste Stelle im gesamten Bereich. Die Standardabweichung beträgt hier 1,4%.
Bild: Abweichung der Windrichtung
Die Standardabweichung der Windrichtung δα = arctan( δV / V0).
| V0 | δα |
|---|---|
| <1 m/s | Keine Richtung |
| 2 m/s | 2,8° |
| >5 m/s | <2,0° |
Die Messung der Windrichtung ist bei diesem Prototyp noch etwas durch die ungenaue Geometrie beeinflusst.
Bild: Messung der Windgeschwindigkeit und Windrichtung bei 15 m/s und einem Winkel von 23.5° über einen
Zeitraum von 300 Sekunden.
Bild: Verteilungsdiagramm der Geschwindigkeit bei 15 m/s.
Die Standardabweichung der Windgeschwindigkeit beträgt 0,10 m/s (∼ 0,6%).
Die Standardabweichung der Windrichtung beträgt 0,5°.
Bild: Messung der Windgeschwindigkeit und Windrichtung bei 5 m/s und einem Winkel von 30° über einen
Zeitraum von 300 Sekunden.
Bild: Verteilungsdiagramm der Windrichtung bei 5 m/s.
Die Standardabweichung der Windgeschwindigkeit beträgt 0,10 m/s (∼ 2,0%).
Die Standardabweichung der Windrichtung beträgt ca. 0,6°.
Es handelt sich wirklich um eine Normalverteilung bei der Windgeschwindigkeit und bei der Windrichtung.
Bei der Windgeschwindigkeit sind 72,2% aller Messwerte innerhalb von ±δ,
94,0% aller Messwerte innerhalb von ±2δ und 99,5% aller Messwerte innerhalb von ±3δ.
Bei der Windrichtung sind 75,6% aller Messwerte innerhalb von ±δ,
94,0% aller Messwerte innerhalb von ±2δ und 99,4% aller Messwerte innerhalb von ±3δ.
Die Entwicklung des Programms war trotz Anpassungen an die neue Hardware (z.B. DMA) sehr viel einfacher und schneller als zuvor.
Bild: Schnappschuss der Oberfläche des Entwicklungssystems
Inzwischen wird Microchip MPLAB X IDE v2.30 und der MPLAB XC16 v1.24 Compiler eingesetzt.
Das Programm ist weitgehend fertig. Wie man leicht sehen kann, ist diesmal noch viel Platz im Programm- und Datenspeicher frei. Es besteht aus ca. 2000 Zeilen C-Programm und benutzt intensiv die hoch optimierten Funktionen der DSP-Library.
Es sind noch weitere Verbesserungen, die aber in dieser Version nicht realisiert werden, möglich. Andere Schallwandler mit höherer Frequenz haben eine größere absolute Bandbreite und einen zum Teil wesentlich kleineren Abstrahlwinkel. Dadurch würde sich die direkte Schallausbreitung die indirekte nicht mehr überlagern. Eine zeitliche Trennung durch den kleinen Winkel zwischen Wind und Schallrichtung währe überflüssig. Damit wäre dann auch der Abstand zum Reflektor deutlich kleiner. Leider benötigen Hochfrequenzversionen der Schallwandler eine Anpassung der akustischen Impedanz an die Luft. Diese Anpassung wird in der Regel durch einen Kunststoff bewerkstelligt. Dieser Kunststoff hat eine sehr schlechte Wärmeleitfähigkeit und birgt damit Probleme im Winterbetrieb. Dazu sind diese Schallwandler teuer und in kleinen Stückzahlen nur schwer erhältlich. Ich bleibe vorerst bei den bereits vorhandenen aber leider eigentlich für die Anwendung schlechten Schallwandlern mit 40 KHz.
Ich bin mit dem Ergebnis sehr zufrieden. Es wird die Spezifikation komplett eingehalten und alle weiteren Eigenschaften entsprechen denen eines kommerziell verkaufsfähigen Präzisionsmessgerätes.
Die Kalibrierung gestaltet sich etwas schwieriger. Die Schallwandler müssen im genauen räumlichen Winkel befestigt werden. Bedingt durch den kleinen Abstand der Schallwandler muss die mechanische Genauigkeit ebenfalls steigen, um gleich gute Ergebnisse zu erzielen. Mit einen Windkanal ist das aber kein Problem.
Ein Schritt zur Entwicklung eines serienreifen Gerätes wäre jetzt nicht mehr groß. Die Elektronik würde auch in den ersten Prototyp sehr gut passen. Leider ist der Windkanal für eine Kalibrierung zu klein.